Other Things about DL
Activation Function
Common properties:
| Property | Reason |
|---|---|
| continuous, differentiable*, non-linear | differentiable so we could use back-propagation to learn parameters and optimize loss function |
| the function and its derivative should be as simple as possible | speed up the calculation |
| the derivative should fall in a certain range, not too large, not too small | otherwise it would slow down the training speed (TODO: why, ReLU doesn’t obey this) |
*Note: Any differentiable function must be continuous at every point in its domain. The converse does not hold: a continuous function need not be differentiable. Eg: is continuous, and differentiable everywhere except .
sigmoid
Logistic
Property:
 |
|---|
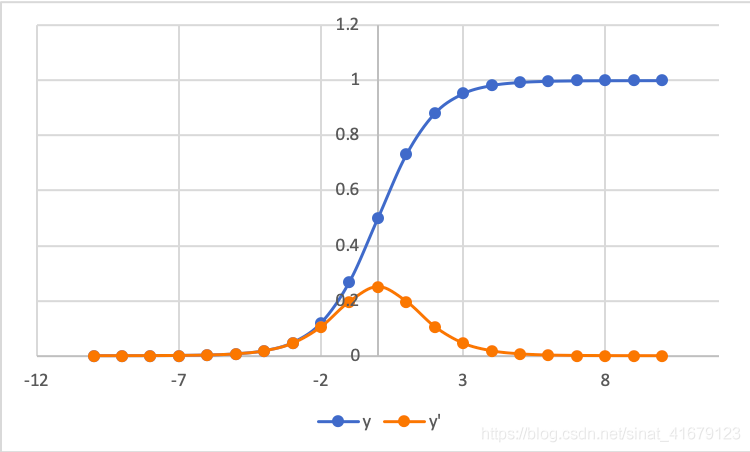
| Sigmoid and its derivative |
For sigmoid function, when , is nearly linear, and is either 0 or 1 for x outside this range. We call as a non-saturation regions.
For its first derivative, when .
tanh
 |
|---|
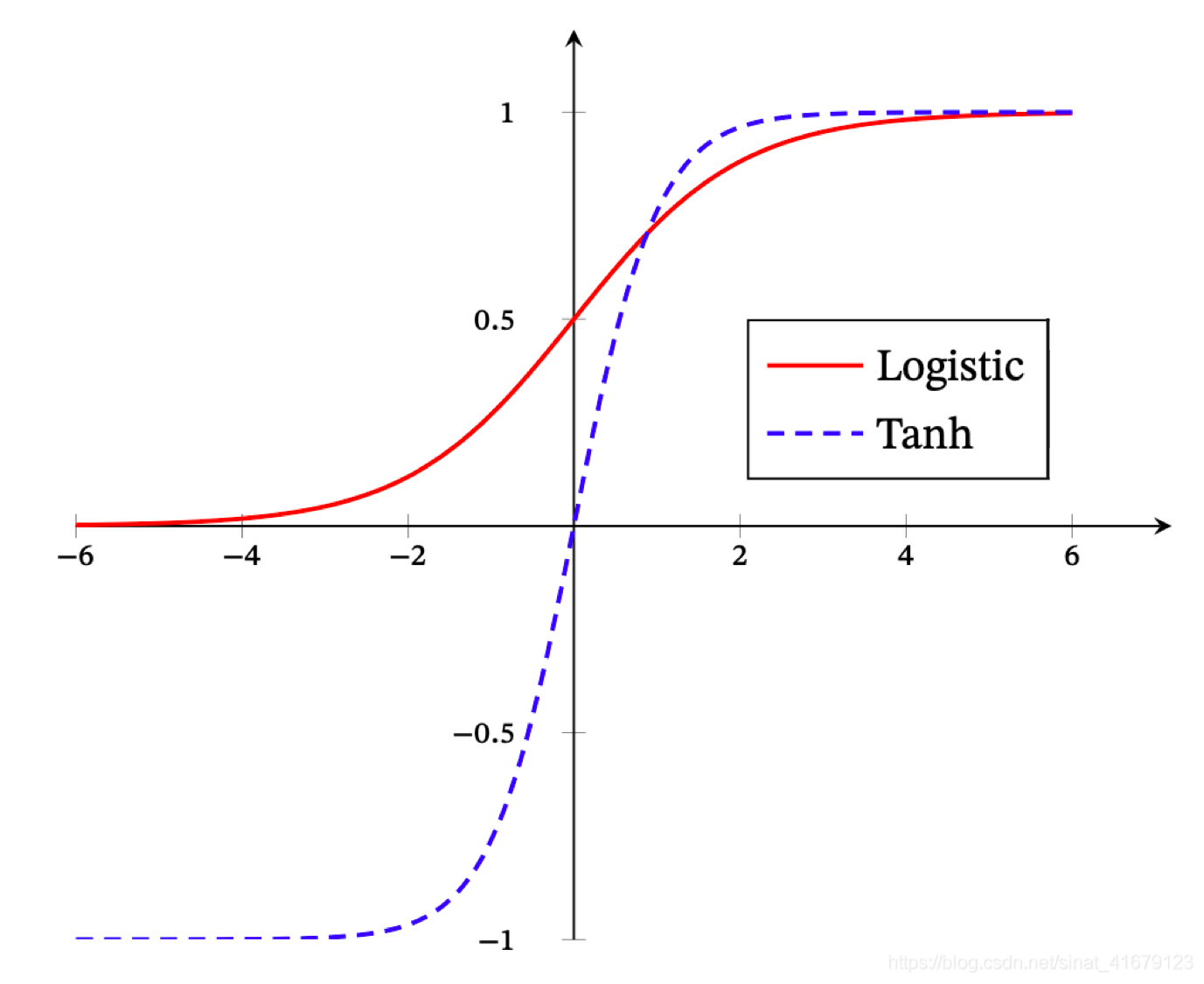
| tanh and sigmoid |
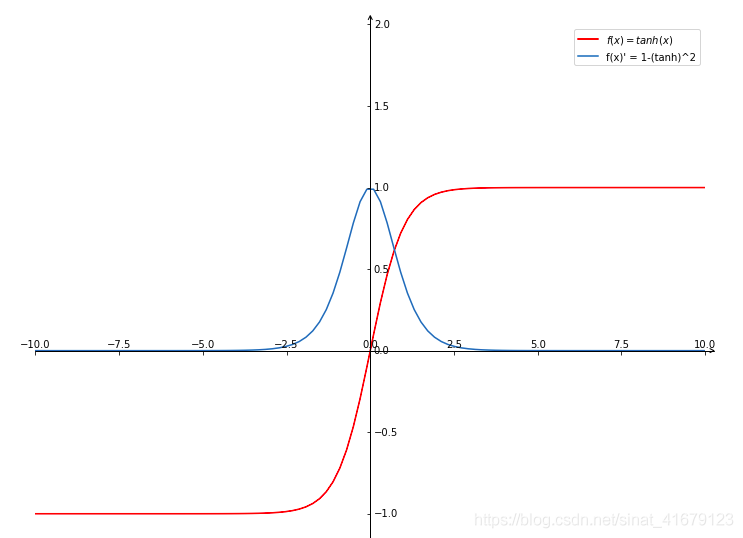
First derivative:
 |
|---|
| tanh and its derivative |
@TODO
ReLU/Rectified linear unit
Vanilla ReLU
Advantages
- Sparse activation: For example, in a randomly initialized network, only about 50% of hidden units are activated (have a non-zero output).
- Better gradient propagation: Fewer vanishing gradient problems compared to sigmoidal activation functions that saturate in both directions.
- Efficient computation: Only comparison, addition and multiplication.
- Scale-invariant:
Disadvantages
- Non-differentiable at zero: however, it is differentiable anywhere else, and the value of the derivative at zero can be arbitrarily chosen to be 0 or 1.
- Not zero-centered: neurons at later layers would have a position bias.
- Unbounded.
- Dying ReLU problem (vanishing gradient problem): When , the derivative of ReLU is 0, meaning the parameter of the neuron won’t udpate by back propagation. And all the neurons that are connected to this neuron won’t update.
- Possible reasons
- The initialization of parameters
- Learning rate is too large. The parameters change too fast from positive to negative.
- Solutions
- Leaky ReLU: would reduce performance (TODO:why?)
- Use auto-scale lr algorithms.
- Possible reasons
Leaky ReLU
Parametric ReLU
Where is a learnable parameter.
ELU
Softplus
Swish Function
GELU
Maxout
Comparision between different activation functions
TODO
Activation functions developed like this: sigmoid -> tanh -> ReLU -> ReLU variants -> maxout
| Activation Function | Advantage | Disvantage |
|---|---|---|
| sigmoid | The range of output is | 1. First derivative is nearly 0 at saturation region 2. Not zero-centered, the inputs for later neurons are all positive 3. Slow because of exponential calculation |
| tanh | Zero-centered, the range of output is | 1. First derivative is nearly 0 at saturation region 2. Slow because of exponential calculation |
| ReLU | 1. Only 1 saturation region 2. Easy to calculate without exponential |
dead ReLU problem |
| ReLU variants | leaky ReLU, etc. Solved the dead ReLU problem | |
| maxout |
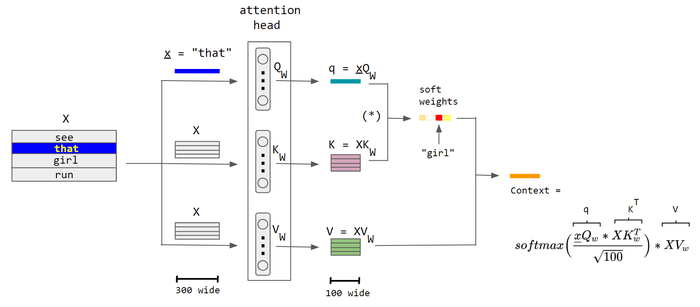
Attention Mechanism
Attention works as a weighted sum/avg, the attention score is the weights of every input.
Let’s say inputs are X, here’s how self KV-attention works:
 |
|---|
| KV Attention |
The output is:
where is the attention score of , in KV attention, it’s calculated by:
Some common ways to calculate attention:
- Standard Scaled Dot-Product Attention
- Multi-Head Attention
where each head was calculates as:
Positional Embedding
Instead of using LSTM/GRU, use positional embedding to capture the positions, usually appears in transformers.
Suppose we have an input sequence with length L, then the positional embedding will be:
Where:
kis the index of positiondis the dimension of positional embeddingiis used for mapping column indicesnis user-defined number, 10,000 in attention is all you need.
Below is an example:
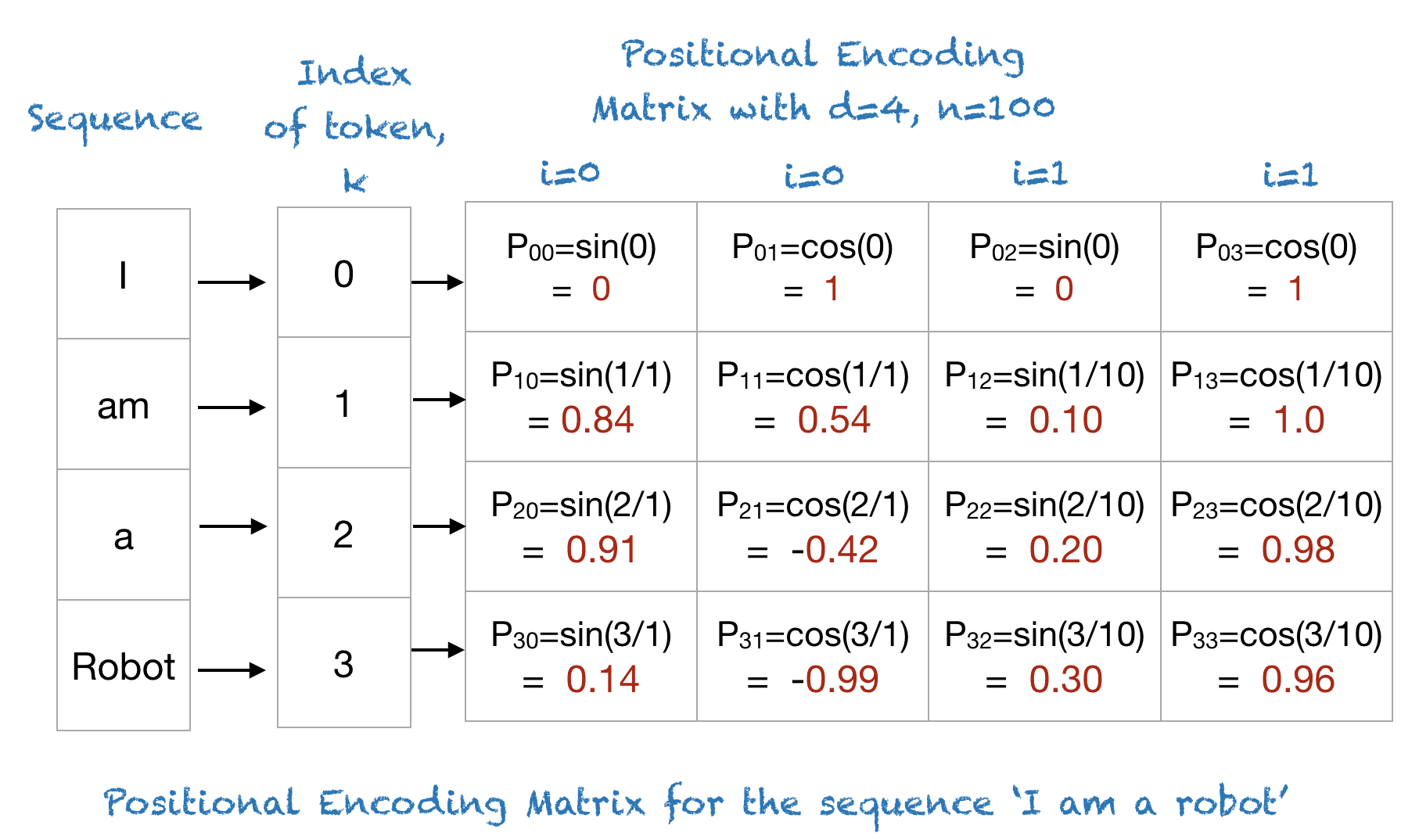 |
|---|
| Example for positional embedding |
In transformer, the author added the positional embedding with word embedding, and then feed it into transformer encoder.
| How positional embedding works in transformer |
Implementation of positional embedding
1 | import numpy as np |
Normalization
Note: I call all kinds of feature scalings as normalization.
Why feature scaling?
- When model is sensitive to distance. If no scaling, then the model will be heavily impacted by the outliners. Or the model will be impacted by features with large ranges.
- If dataset contains features that have different ranges, units of measurement, or orders of magnitude.
Do the normalization on training set, and use the statistics from training set to test set
Max-Min Scaling/unity-based normalization
Scaled features to range from [0, 1].
When , then . On the other hand, when , . So this range will be [0, 1]
It could also generalize to restrict the range of values in the dataset between any arbitrary points and .
Log Scaling
Usually used when there are long tail problems.
Z-score
After z-score, the distribution of the data would be normal distribution/bell curve.
Property of normal distribution:
For linear models, because they assume the data distribution is normal, so better do normalization.
Batch Normalization
Why use batch normalization?
Because in deep neural networks, the distribution of data will shift through the layers, which is called internal variance.
So we use BN between layers to mitigate the consequences.
How do we do batch normalizations?
For every mini-batch, calculate the normalization of each feature on every sample. The and are the mean and the variance of the samples respectively.
To be less restrictive, batch normalization add a scaling factor and an offset , so the result is:
Limitations
- BN calculates based on the batch, so the batch size needs to be big.
- Not suitable for sequence models.
Layer Normalization
Similar to BN, but do the normalization based on feature scale. The and are the mean and variance of the features on one sample respectively.
LN is calculating the normalization of the features, it’s scaling different features.
LN is more common in NLP, transformer uses layer normalization.
Regularization
Dropout
Dropout is a layer, it can be applied before input layer or hidden layers.
For input layer, the dropout rate is usually 0.2, which means for every input neuron, there’s 80% chance they will be used.
For hidden layer, the dropout rate is usually 0.5.
In pytorch, the implement is as follows:
1 | import torch.nn as nn |
When we do the inference, we don’t use dropout, just multiply the drop probability to every weight.
In pytorch, by model.eval(), it will do this automatically.
Early Stop
Stop running the model when triggered. Some early-stop triggers can be:
- No change in the metric over a given number of epochs.
- An absolute change in the metric.
- A decrease in the performance observed over a given number of epochs.
- Average change in the metrics over a given number of epochs.
Initialize
The initialization of the neural network shouldn’t be 0, or too small, or too large.
Initialize to be zeros
All the neurons will give the same effects to the output, when back propagating, the weights will be the same.
Initialize too small
Gradient vanishing.
initialize too large
Gradient explosion.
The common way to initialize is making sure: , which means it’s like a standard normal distribution.
Also, we want to keep the variance the same accross every layer.
Xavier Initialization
Initialize the weights to have , and the same across all layers.
Normal xavier initialization
where are the number of input in the input layer and the number of output in the output layer respectively.
Uniform xavier initialization
Xavier works better with tanh and sigmoid activation functions.
For ReLU function, usually we use He initialization.
Questions
Why use as activation function?
Why ReLU instead of ?
not saturate in both directions
allow faster and effective training of deep neural architectures on large and complex datasets.